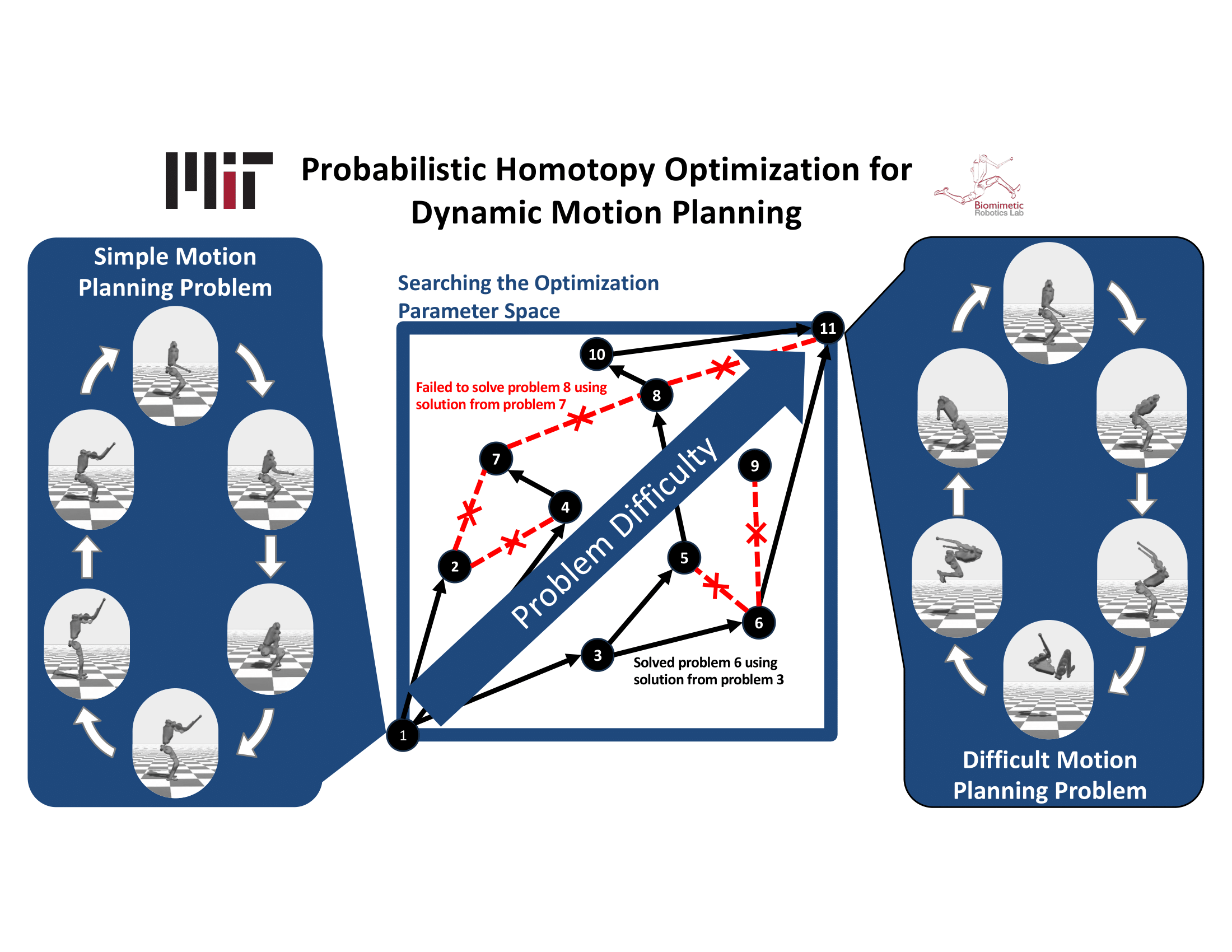
Probabilistic Homotopy Optimization for Dynamic Motion Planning
Shayan Pardis* , Matthew Chignoli* , Sangbae Kim
International Conference on Intelligent Robots and Systems (IROS 2024)
Inspired by Curriculum Learning and Probabilistic Roadmaps, PHO traverses a multidimensional homotopy space and discovers highly dynamic trajectories.